ROBOTIC ARM PROGRESS
main structure = 100%
electronics= 90% (motors fitted on what has been so far built)
programming= 50% (programming complete, not tested or flashed onto ardino so no promises that itll work)
time spent on arm = 463 days as of 01/10/24. (started 26/06/23)
.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.
log 01-26/08/23: i slacked quite alot near the end of summer, i need to get my 3d printer back up and running
log 02-04/09/23: begin printing parts of base, back on track!
log 03-14/11/23: ive had to do a total restart of how the arm is controlled, it was previously intended to use an android phone to connect but the code doesnt work with servo 6 and 7, im now going to use a gesture glove
log 04-01/10/24: wow, been a while since ive updated this, ill just include everything here, i've lost interest in this project quite a few times, but the stryuggle is a part of the fun, im curently focusing on ohter smaller projects to clear my mind, youll see a new link on the main page soon mentioning what ive done recently, ive made quite a good chunk of progress in the burst of interest that i had briefly, the entirety of the arm is printed and all electronmics have been mostly hooked up, however coding and lack of clarity from the designers of the electronics schematics is making it difficuklt, ill get though it though, no big deal hopefully. new photos should come soon aswell. update: photos added
._._._._._._._._._._._._._._._._._._._._._._.
disclaimer: i did not make any of these and all credit should go to the original makers, some of the programming for the ardino and controller was completed and refined by chatgpt-2
all parts where either 3d-printed by my ender3-v2 or bought from amazon with the exception of the android phone which was gifted to me by my brother who didnt need it anymore
-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
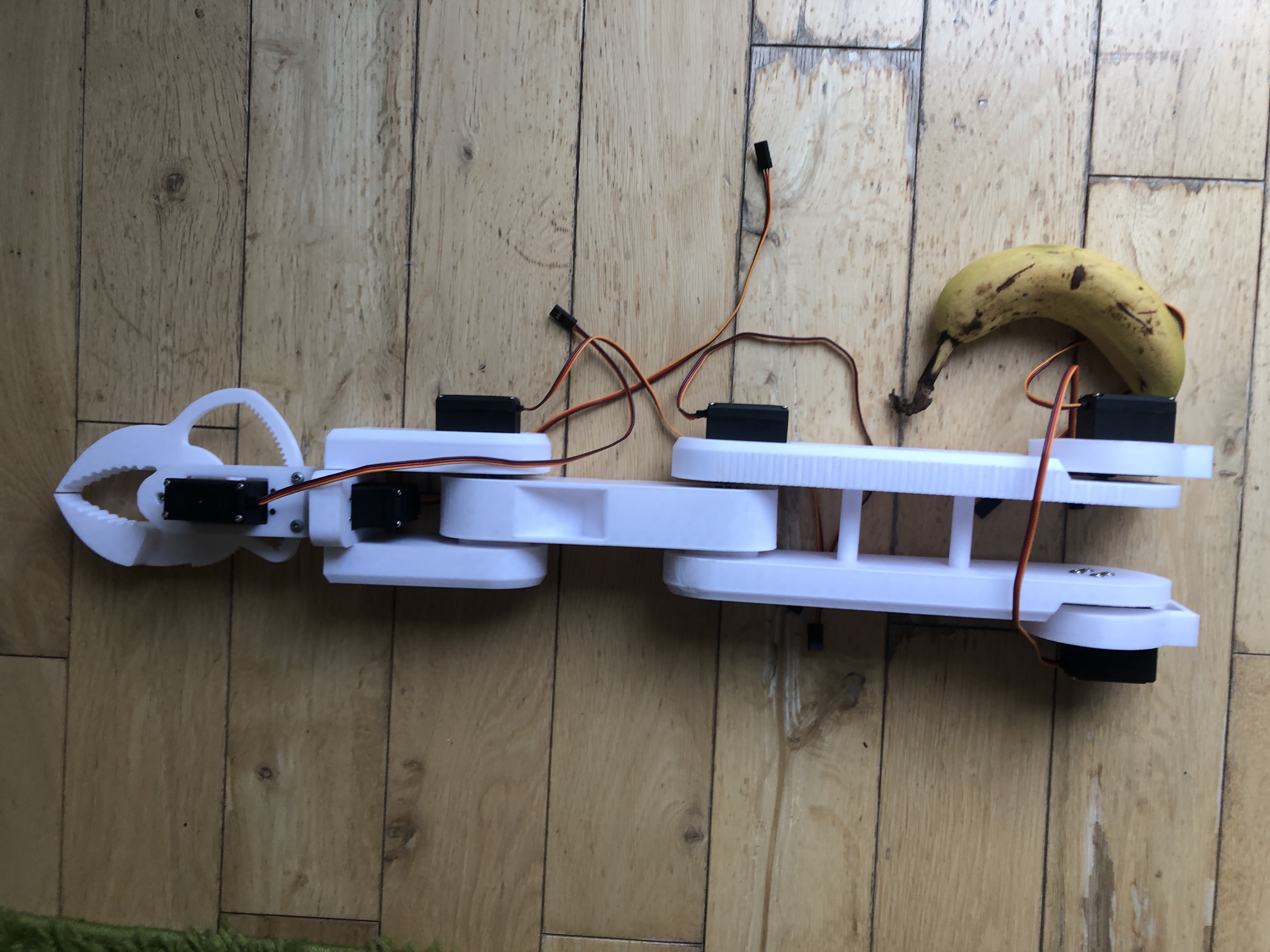
⬆️ the robotic arm (no waist joint) with scale to a banana
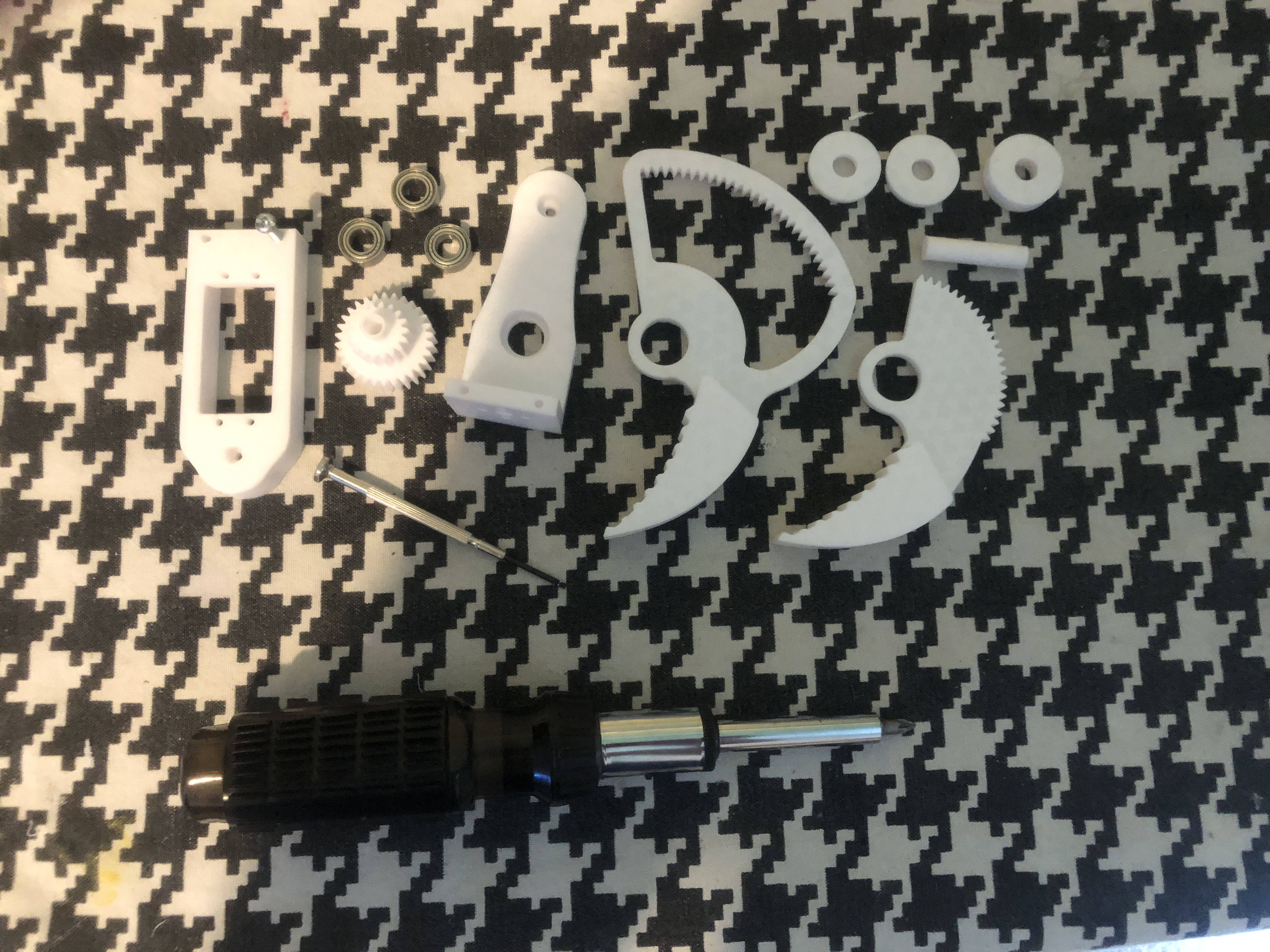
⬆️ individual parts of the claw, all operated by just one servo
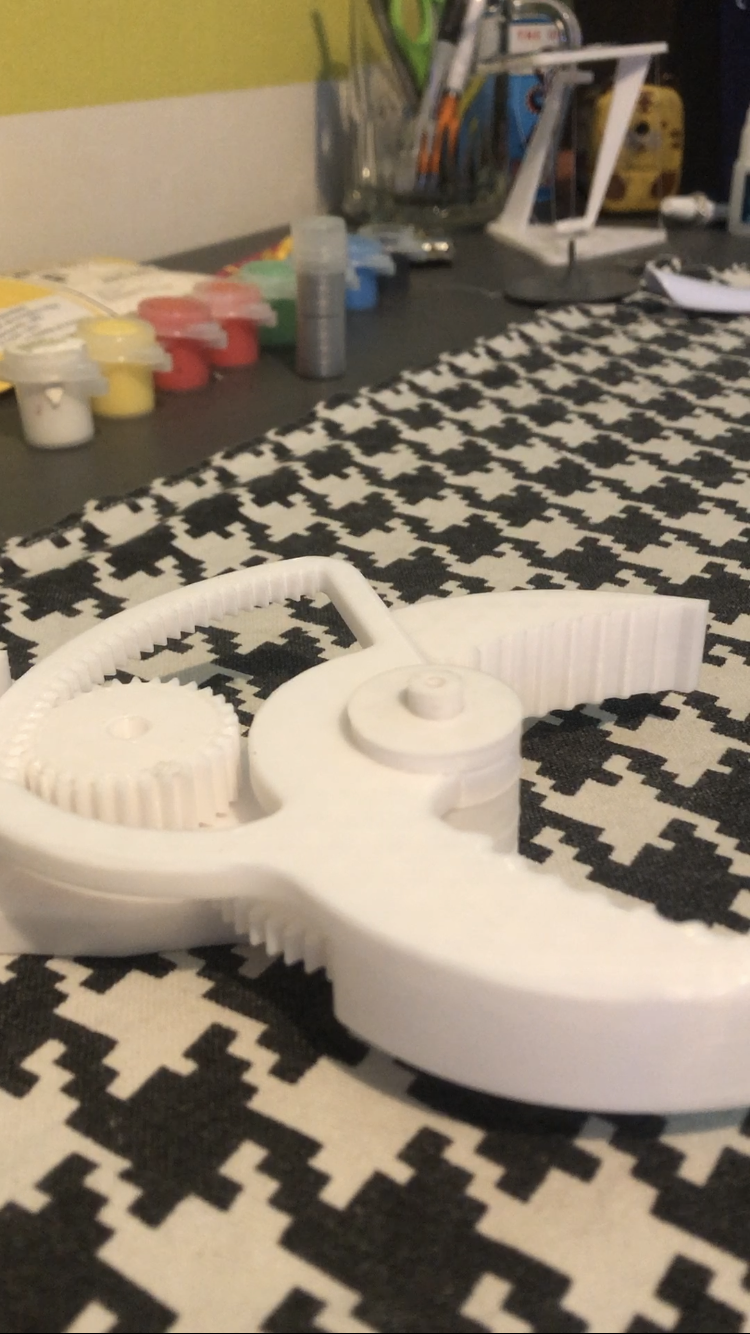
⬆️ the claw, fully built
⬆️ a GIF of the claw in works, connected to a flipper zero's GPIO for control
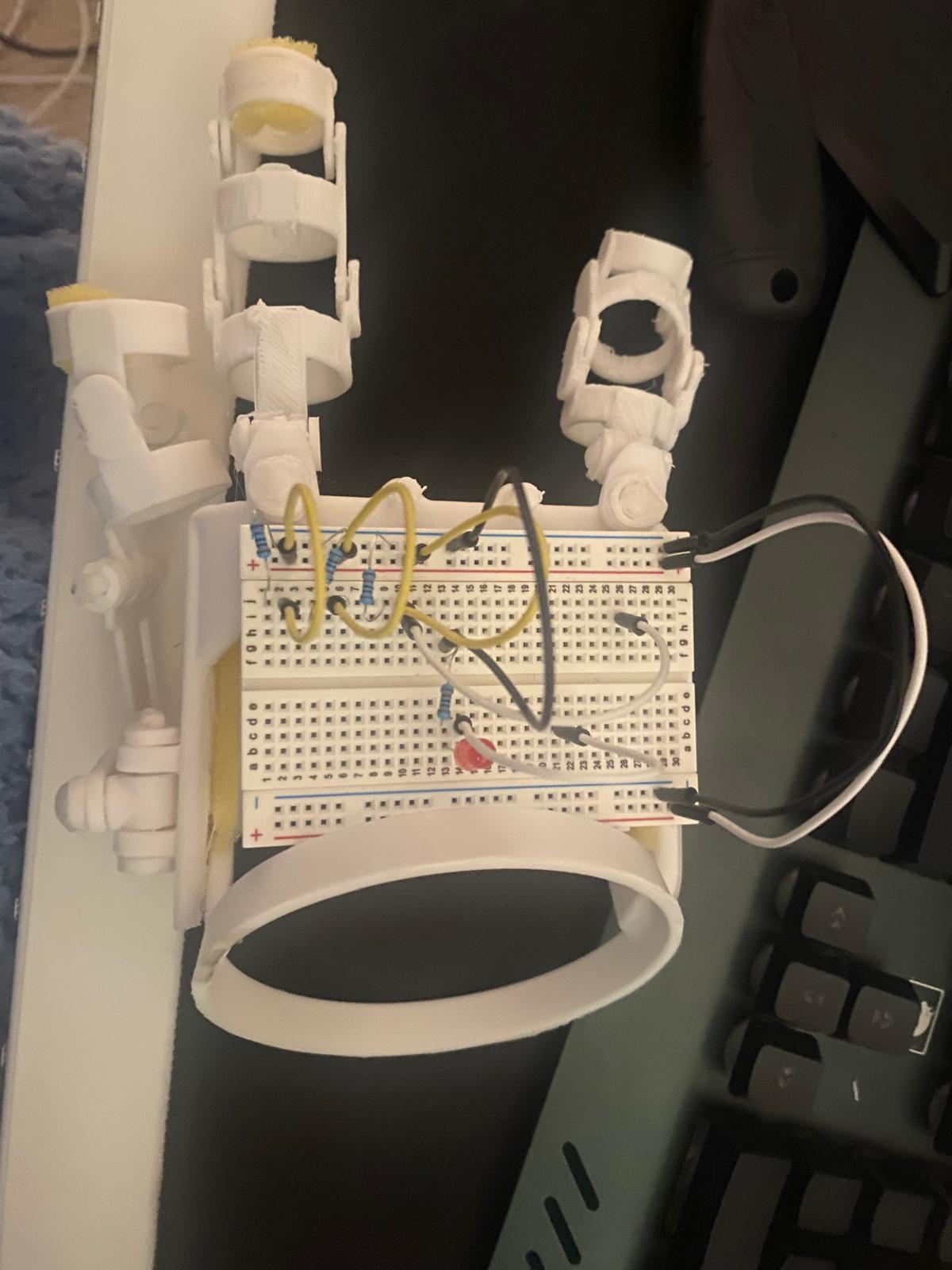
the control gauntlet wiht very basic wiring implemented

the control gauntlet with all electronics
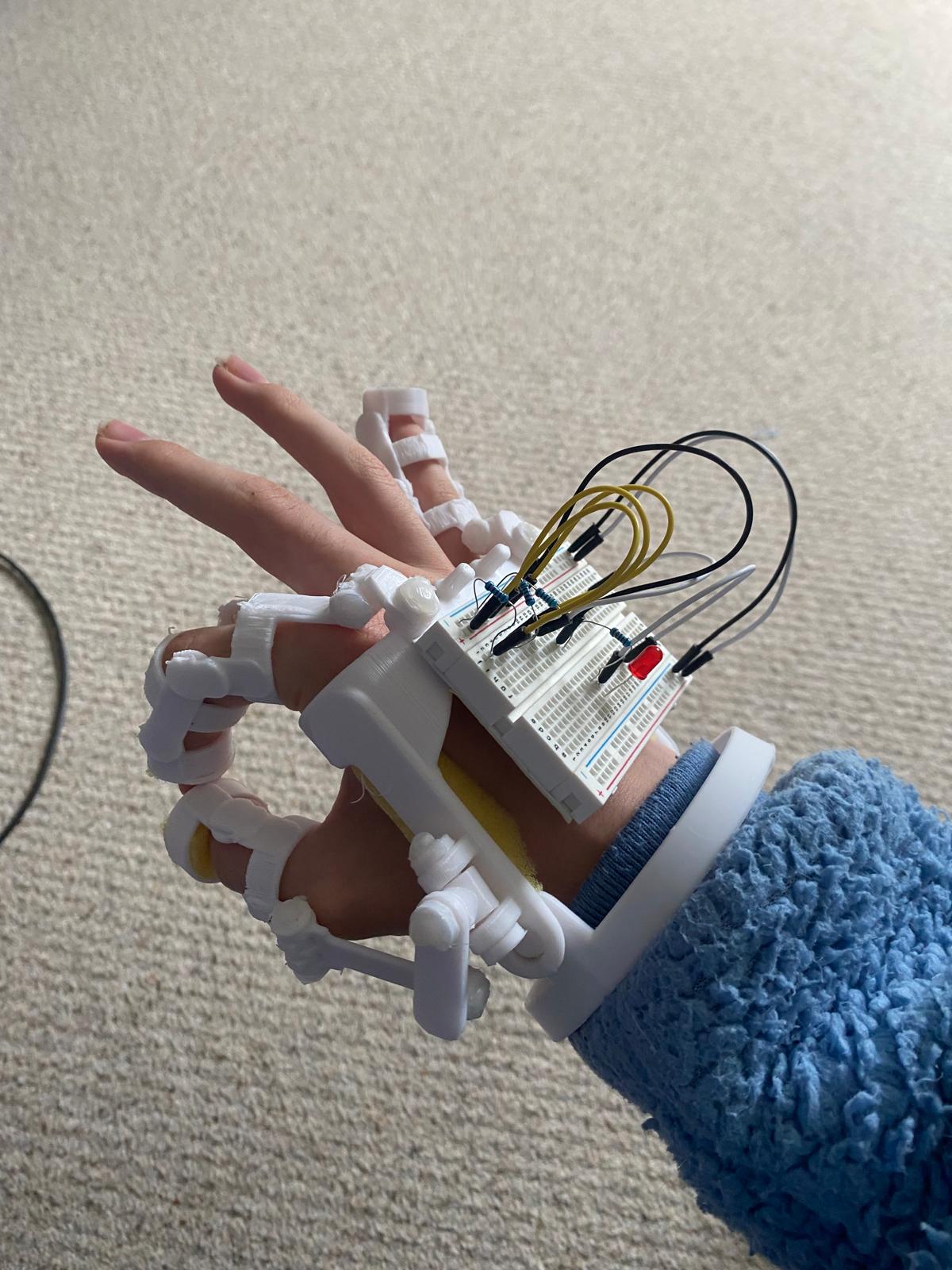
showcase of how the gauntlet fits on my hand

the completed print of the arm, with attached servos and pretty stickers
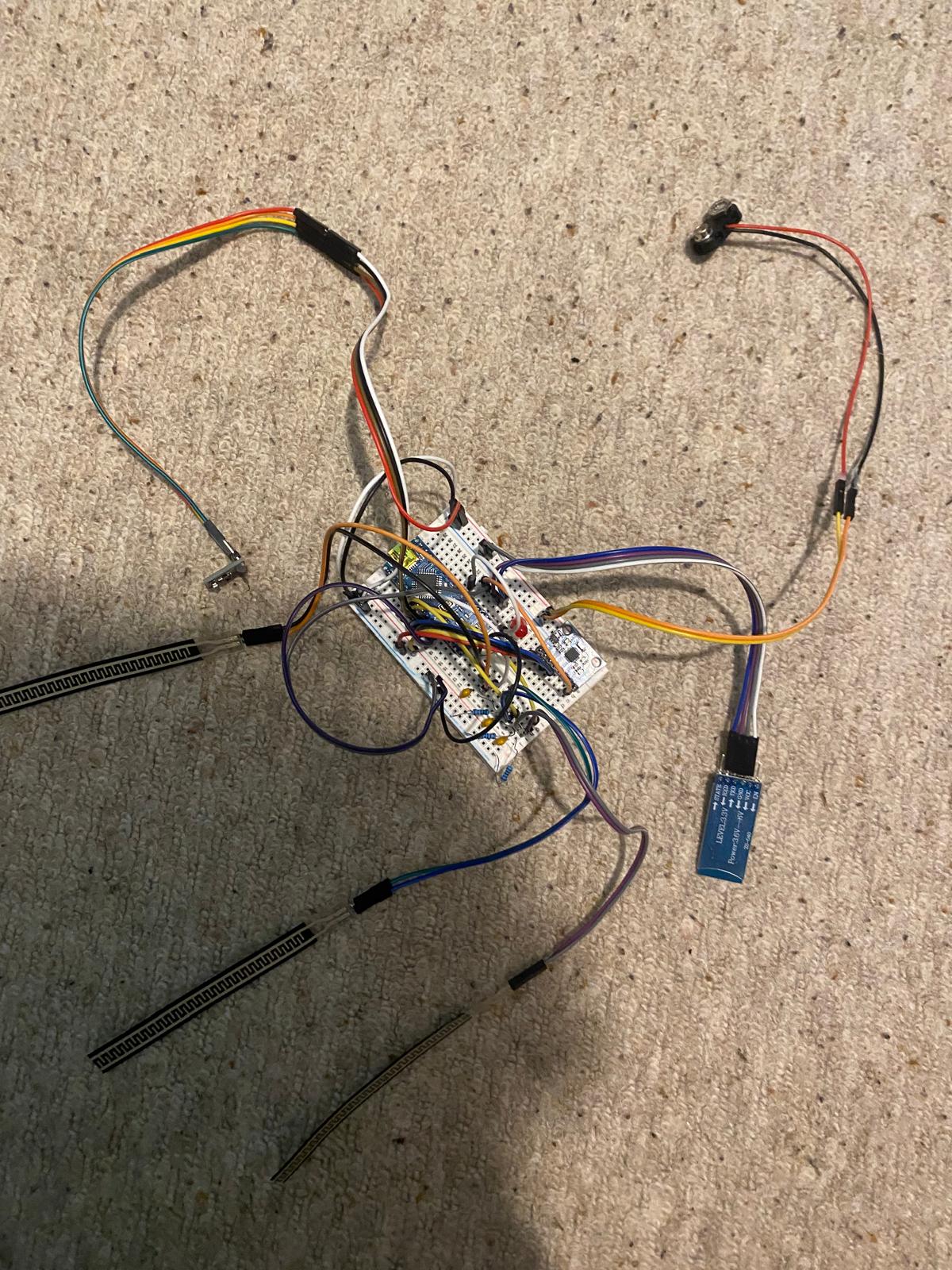
the naked electronics of the gauntlet